
بر اساس IEC 60034-27
مکانیسم فیزیک گاز یک تخلیه جزئی یک حرکت بار گذرا ایجاد می کند که می تواند به عنوان یک پالس الکتریکی اندازه گیری شود که به عنوان یک جریان گذرا در یک مدار تخلیه رسانا جریان دارد (شکل 1 را ببینید). علاوه بر این، از آنجایی که هر تخلیه جزئی با یک فرآیند تبدیل انرژی مرتبط است، اندازهگیری یک PD نیز میتواند با دریافت تابش نور، سیگنالهای صوتی، امواج الکترومغناطیسی یا تشکیل واکنشهای شیمیایی انجام شود. با این حال، این بند صرفاً به روش های الکتریکی اندازه گیری تخلیه جزئی می پردازد زیرا اندازه گیری الکتریکی تخلیه جزئی رایج ترین روش مورد استفاده برای ارزیابی وضعیت عایق سیم پیچ ماشین های الکتریکی دوار است. اندازهگیری الکتریکی را میتوان با استفاده از حسگرهای PD که اجزای سیگنال پالس هدایت شده را تشخیص میدهند، یا با استفاده از آنتنهایی که اجزای امواج الکترومغناطیسی سیگنالهای پالس را شناسایی میکنند، انجام داد.
سیستمهای اندازهگیری تخلیه جزئی را میتوان به زیرسیستمهایی تقسیم کرد:
سنسور PD شامل سیستم انتقال سیگنال و دستگاه اندازهگیری PD، که هر دو به طور قابلتوجهی بر نتایج اندازهگیری PD تأثیر میگذارند. انتخاب سنسورها، ابزار دقیق و روش اندازه گیری با پارامترهای اندازه گیری مورد انتظار تعیین می شود که برای تجزیه و تحلیل و تفسیر بیشتر اندازه گیری ها استفاده می شود.
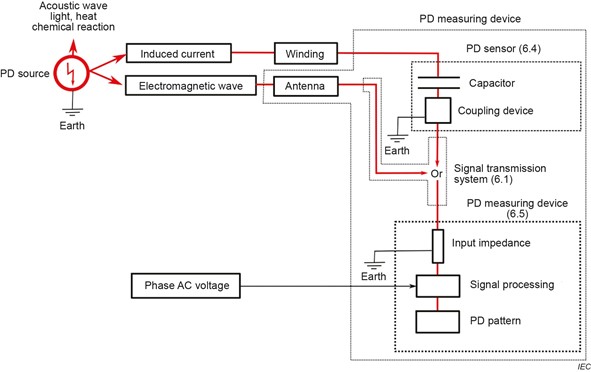
شکل 1- نمای کلی سیستم اندازه گیری PD و زیر سیستم های آن
انتشار پالس در سیم پیچ
در مبدا جریان تخلیه جزئی می تواند به عنوان یک پالس گذرا با زمان افزایش تا چند نانوثانیه مشخص شود. برای این پالسهای کوتاه PD با طیف فرکانس بالا، سیمپیچهای استاتور اجسامی را با عناصر پراکنده نشان میدهند که در آنها موج متحرک، جفتگیری خازنی و القایی پیچیده و پدیدههای تشدید رخ میدهند (شکل 2). بنابراین، پدیده انتشار پالس PD باید در نظر گرفته شود. با توجه به تضعیف، اعوجاج، انعکاس و کوپلینگ متقاطع سیگنال های موج انتقالی، شکل و بزرگی سیگنال PD ثبت شده در محل سنسور PD نصب شده با سیگنال های موجود در نقطه ای که منشاء می گیرد متفاوت است. با در نظر گرفتن این موضوع، نکات زیر برای اندازهگیری و تفسیر بعدی اندازهگیریهای PD که در ماشینهای الکتریکی دوار انجام میشود بسیار مهم است:
– تابع انتقال از منبع PD به حسگر PD ناشناخته است و به طراحی خاص ماشین و محل منبع PD که پاسخ فرکانسی سیم پیچ استاتور را تعیین می کند، بستگی دارد. بنابراین، انرژی در منبع PD را نمی توان به طور مستقیم اندازه گیری کرد.
– اجزای فرکانس بسیار بالای سیگنال های PD در هنگام عبور از سیم پیچ در معرض تضعیف قرار می گیرند و بسته به منشا PD، ممکن است در محل سنسور PD قابل تشخیص نباشند.
در نتیجه پدیده های ذکر شده در بالا، نه تنها طراحی خاص سیم پیچ استاتور، بلکه پاسخ فرکانسی خاص سیستم تشخیص PD، از جمله سنسور PD، دستگاه اندازه گیری و تنظیمات فیلتر، به طور قابل توجهی بر ویژگی های سیگنال PD شناسایی شده از دستگاه تأثیر می گذارد. سیم پیچ اندازه گیری های مختلف باید در یک محدوده فرکانسی انجام شود تا با یکدیگر قابل مقایسه باشند.

منحنی های ایده آل هر مرحله برای نشان دادن رفتار کلی نشان داده شده است.
شکل 2 – سری کانال های پاسخ فرکانسی
ویژگی های انتقال سیگنال
شکل 3 به صورت شماتیک پاسخ فرکانسی یک پالس PD ایده آل در مبدأ PD در سیم پیچ (فرکانس قطع بالا fuPDo) و پاسخ فرکانس ایده آل در پایانه های دستگاه (فرکانس قطع بالا fuPDt) پس از حرکت از منبع PD از طریق سیم پیچ به پایانه ها را نشان می دهد. با توجه به تضعیف احتمالی اجزای دارای فرکانس بسیار بالا، وقتی فرکانس قطع بالای سیگنال PD به پایانه ها می رسد (fuPDt) به طور قابل توجهی کمتر از (fuPDo) پالس PD اصلی خواهد بود. فرکانس قطع بالا fuPDo به نوع گاز، چگالی گاز و نوع نقص بستگی دارد.
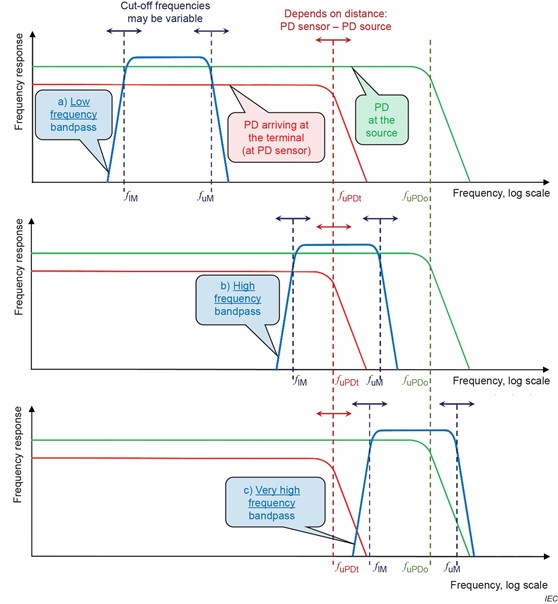
شکل 3 – پاسخ فرکانسی ایده آل یک پالس PD در منبع PD و در پایانه های ماشین
پاسخ فرکانسی سیستم های مختلف اندازه گیری PD:
الف) محدوده فرکانس پایین، ب) محدوده فرکانس بالا، ج) محدوده فرکانس بسیار بالا
سیستم اندازهگیری PD، شامل سنسور PD، سرنخهای اندازهگیری و ابزار اندازهگیری، ویژگیهای فیلتر باند گذر را نشان میدهد که فرکانسهای قطع پایین و بالایی دارند، که عمدتاً به طراحی خاص سنسور PD و امپدانس ورودی دستگاه اندازهگیری بستگی دارد. در شکل 3 سه مثال a)، b) و c) برای پاسخ های فرکانسی مختلف سیستم های اندازه گیری PD نشان داده شده است. برای سیستمهای تجاری موجود، فرکانسهای قطع، و در نتیجه پهنای باند اندازهگیری سیستم، ممکن است در طیف وسیعی از فرکانسها متفاوت باشد. پاسخ فرکانس مشخصه سیستم کامل اندازه گیری تأثیر قابل توجهی بر حساسیت کلی تشخیص و خواص سیگنال مورد استفاده برای تجزیه و تحلیل و تفسیر بیشتر دارد.
لازم به ذکر است که شکل 3 تنها با نشان دادن منحنی های ایده آل، روابط بنیادی را توصیف می کند. بسته به طراحی سیم پیچ و آرایش اندازه گیری مورد استفاده، در موارد عملی ممکن است چندین اثر وجود داشته باشد که بر شکل دقیق منحنی های پاسخ فرکانسی تأثیر بگذارد و بنابراین ممکن است نتایج PD را نیز تحت تأثیر قرار دهد، به عنوان مثال. پدیده رزونانس در محدوده فرکانس سیستم اندازه گیری PD، به شکل 2 مراجعه کنید.
همانطور که در IEC TS 62478 بحث شد، اندازهگیریهای PD آنلاین در ماشینهای الکتریکی دوار از محدودههای فرکانس معمول زیر برای سیستم کامل اندازهگیری PD استفاده میکنند:
الف) در محدوده فرکانس پایین (LF) از پهنای باند معمولی حدود 1 مگاهرتز یا چند صد کیلوهرتز استفاده میشود، با فرکانسهای قطع پایینتر معمولاً بالای 100 کیلوهرتز و فرکانسهای قطع بالا معمولاً زیر 3 مگاهرتز. اندازهگیری در آن محدوده فرکانس، حساسیت خوبی را نه تنها برای تخلیههای جزئی در میلهها/کویلهای نزدیک به حسگر PD، بلکه برای آنهایی که از دورتر در سیمپیچ منشأ میگیرند، تضمین میکند. از آنجایی که محدوده فرکانس پایین بیشتر در معرض نویز و اغتشاش است، که به ویژه در طول اندازهگیریهای آنلاین وجود دارد (به بند B.2 مراجعه کنید)، روشهای خاصی برای جداسازی نویز و اغتشاش مورد نیاز است.
یک سیستم اندازهگیری باند وسیع با استفاده از پهنای باند فرکانس پایین کامل تا محدوده مگاهرتز میتواند بیشتر محتوای انرژی PD موجود را برای تجزیه و تحلیل سیگنال بیشتر و روشهای تشخیص نویز مستقل از رزونانسهای محلی اجتنابناپذیر طیف انتقال پالس خلاصه کند. از آنجایی که فرکانس قطع بالای باند ردیابی به طور قابل توجهی کمتر از فرکانس قطع بالایی پاسخ فرکانس پالس است، پالس های PD شناسایی شده مستقیماً با اجزای فرکانس پایین پالس PD متناسب هستند. با این حال، شکل پالس سیگنال خروجی باند گذر توسط ویژگی های باند گذر فرکانس پایین تعیین می شود. از آنجایی که شکل اصلی پالس PD که به محل حسگر می رسد هنگام استفاده از سیستم های باند گذر فرکانس پایین از بین می رود، جداسازی سیگنال های اختلال با تجزیه و تحلیل شکل پالس یا جداسازی حوزه زمانی محدود است.
ب) در محدوده فرکانس بالا (HF) از پهنای باند معمولی 3 مگاهرتز تا 30 مگاهرتز استفاده می شود. فرکانسهای قطع پایینتر نیز ممکن است زیر 1 مگاهرتز تنظیم شوند تا از حساسیت خوب برای PD در سراسر سیمپیچ اطمینان حاصل شود. با این حال، اغلب فرکانسهای قطع پایینتر بالای 1 مگاهرتز برای سرکوب مؤثر سیگنالهای اختلال معمولی که در محدوده فرکانس پایین وجود دارند، استفاده میشوند.
تشخیص PD در محدوده فرکانس بالا کمتر مستعد نویز و اغتشاش است و میتواند به طور موثر برای مشخص کردن پالسهای PD که به حسگر PD میرسند با شکل تک تک آنها استفاده شود و بنابراین میتواند بین منابع مختلف PD بر اساس شکل سیگنال آنها تمایز قائل شود. در مواردی که فرکانس قطع بالای سیستم تشخیص بسیار بالاتر از فرکانس قطع بالایی سیگنال PD است که به محل سنسور PD می رسد، سیگنال خروجی باند گذر شکل پالس PD را نشان می دهد اما دیگر با بار ظاهری پالس PD نسبت مستقیم نخواهد داشت.
بنابراین، نتایج PD در محدوده فرکانس بالا معمولاً بر حسب ولتاژ [mV] بیان می شود. روش های کارآمد جداسازی اختلال دامنه فرکانس و زمان را می توان طبق بند B.5 اعمال کرد. اندازهگیریهای زمان پرواز که با پالسهای جداگانه انجام میشوند، میتوانند برای محلیسازی PD یا منبع اختلال در داخل یا خارج از دستگاه استفاده شوند، تا زمانی که دو سنسور بیش از 10 متر از هم فاصله داشته باشند و پهنای باند 30 مگاهرتز را فرض کنیم.
نکته 1 یکی از سنسورهای اندازه گیری زمان انتشار را می توان در گذرگاه خروجی قرار داد.
ج) در محدوده فرکانس بسیار بالا (VHF) از پهنای باند معمولی چند صد مگاهرتز با فرکانسهای قطع پایینتر معمولاً 30 مگاهرتز و فرکانسهای قطع بالا تا محدوده 300 مگاهرتز استفاده میشود. همانطور که در شکل 3 نشان داده شده است، پاسخ فرکانسی چنین سیستم هایی یک همپوشانی آشکار با پاسخ فرکانسی پالس PD اصلی را نشان می دهد و بنابراین اندازه گیری ها در محدوده فرکانس بسیار بالا حساسیت خوبی را نسبت به سیگنال هایی که نزدیکتر به سنسور PD منشا می گیرند تضمین می کند.
سنسور PD باید در پایانه های ولتاژ بالا نصب شود و در نتیجه نزدیک سیم پیچ ها/میله هایی باشد که بیشترین تنش الکتریکی را در سیم پیچ تجربه می کنند. محدوده فرکانس بسیار بالا نیز نسبت سیگنال به نویز خوبی را ارائه می دهد و بنابراین کمتر در معرض نویز و اختلال است. از آنجایی که فرکانس قطع بالایی سیستم تشخیص بسیار بالاتر از فرکانس قطع بالایی سیگنال PD است که به محل سنسور PD می رسد، سیگنال اندازه گیری شده شکل پالس PD را نشان می دهد اما دیگر متناسب با آن نخواهد بود. بار ظاهری پالس PD بنابراین، نتایج PD در محدوده فرکانس بسیار بالا معمولاً بر حسب ولتاژ (mV) بیان می شود.
همانطور که در شکل 3 ج نشان داده شده است، توانایی تشخیص PD در این محدوده فرکانس به دلیل فرکانس قطع بالای تکانه های PD که به موقعیت سنسور PD می رسند (fuPDt) کاهش می یابد.
تشخیص PD در محدوده VHF زمان وضوح پالس بسیار کوتاهی را تضمین می کند زیرا شکل پالس جریان PD بسیار کوتاه اصلی را می توان تشخیص داد. بنابراین، روشهای کارآمد جداسازی اختلال حوزه زمان و فرکانس مانند رسیدن زمان پالس، تحلیل شکل پالس و نقشههای TF را میتوان بر اساس پیوست B اعمال کرد. منبع PD در داخل یا خارج از دستگاه، تا زمانی که دو سنسور بیش از 2 متر از هم فاصله داشته باشند، با فرض پهنای باند کامل 300 مگاهرتز.
د) در محدوده فرکانس فوقالعاده بالا (UHF) از فرکانسهای قطع پایینتر معمولاً 300 مگاهرتز و فرکانسهای قطع بالایی تا 3 گیگاهرتز استفاده میشود. حسگرهای PD که در آن محدوده فرکانس کار می کنند آنتن هایی هستند که سیگنال های پالس تابش شده الکترومغناطیسی را تشخیص می دهند. انرژی سیگنال شناسایی شده توسط این سنسورها و در نتیجه حساسیت تشخیص PD عمدتاً به مکان خاص آنتن، فاصله بین آنتن و منبع PD و پهنای باند سیستم تشخیص بستگی دارد. به طور کلی، هرچه آنتن به منابع خاص PD نزدیکتر باشد، حساسیت تشخیص PD بهتر خواهد بود. تضعیف بالایی برای سیگنال های پالس از منابع PD در داخل شکاف وجود دارد و بنابراین توسط هسته آهنی محافظت می شود.
توجه 2 فرکانس قطع بالای PD که به موقعیت سنسور PD (حسگر) fuPDt می رسد ممکن است بسته به فاصله بین سنسور PD و منبع PD به طور قابل توجهی متفاوت باشد. یک فاصله کوچک ممکن است منجر به فرکانس قطع بالاتر شود، یک فاصله زیاد ممکن است منجر به فرکانس قطع کمتری به دلیل پدیده میرایی شود.
بنابراین، در مورد ب) و به ویژه در مورد ج) بسته به فرکانس برش پایین فیلتر باند گذر و همپوشانی پاسخ های فرکانسی فیلتر گذر، سیستم اندازه گیری حساسیت خوبی نسبت به منابع PD نزدیک به سنسور نشان می دهد. سیگنال PD در محل سنسور.
سنسور PD
در اصل PD را می توان با سیگنال های پالس هدایت شده یا الکترومغناطیسی تابش شده تشخیص داد. در مورد سیگنالهای PD هدایتشده، از یک ظرفیت جداگانه برای تشخیص سیگنال PD که به محل سنسور PD نصب شده میرسد، استفاده میشود.
سیگنال پالس تابش شده الکترومغناطیسی به دلیل اثرات غربالگری مختلف توسط اجزای ماشین به عنوان هسته آهنی با شکاف ها، پوشش های رسانا و غیره ضعیف می شود.
بنابراین، محل آنتن، فاصله تا منبع PD و پهنای باند خاص سیستم تشخیص به طور قابل توجهی بر حساسیت تشخیص تأثیر می گذارد.
6.4.2 طراحی حسگرهای PD
سنسورهای PD که سیگنالهای پالس هدایت شده را تشخیص میدهند معمولاً از یک خازن ولتاژ بالا که اغلب خازن کوپلینگ نامیده میشود و یک دستگاه کوپلینگ ولتاژ پایین به صورت سری تشکیل میشوند.
به عنوان ظرفیت از ترتیبات زیر می توان استفاده کرد:
– خازن کوپلینگ اختصاصی PD؛
– خازن افزایشی موجود؛
– ظرفیت کابل های برق منتهی به دستگاه.
به منظور ایجاد یک سنسور PD، این ظرفیتها را میتوان همراه با دستگاههای کوپلینگ زیر که برای پاسخ فرکانسی مناسب طراحی شدهاند، استفاده کرد:
– شبکه های RLC؛
– ترانسفورماتورهای جریان فرکانس بالا شامل ترانسفورماتورهای ایزوله و کویل های روگوفسکی.
سنسورهای PD که سیگنالهای پالس تابش شده الکترومغناطیسی را تشخیص میدهند، معمولاً آنتن هستند که بسته به محل نصب و عملکرد پاسخ فرکانسی خاص خود، حساسیت مشخصی را بهطور قابلتوجهی ارائه میدهند.
به عنوان سنسور PD می توان از دستگاه های زیر استفاده کرد:
– آنتن هایی که به طور خاص برای اندازه گیری PD طراحی شده اند، مانند جفت کننده های اسلات استاتور.
– اسلات RTD از قبل در سیم پیچ استاتور نصب شده است.
– آنتنهای پچ یا میکرواستریپ که در مکانهای خاصی در محفظه دستگاه نصب شدهاند.
سنسورهای PD که به عنوان آنتن عمل می کنند معمولاً برای کار در محدوده فرکانس بسیار بالا و فوق العاده طراحی شده اند. این حسگرها باید تا حد امکان نزدیک به آن قسمت از سیم پیچ نصب شوند که ممکن است بیشتر در معرض فعالیت حیاتی PD باشد.
توجه:
مواردی وجود دارد که در آنها از ترانسفورماتورهای جریان فرکانس بالا به طور مستقیم در کابل های ارت اتصالات نول ژنراتور استفاده می شود. با این حال، این دستگاه های کوپلینگ تنها اطلاعات بسیار محدودی از سیگنال های PD مشابه در آن قسمت از سیم پیچ که نزدیک ترین انتهای خنثی است، ارائه می دهند. علاوه بر این، طراحی باید عایق ولتاژ بالا مناسبی را برای مقاومت در برابر خطای زمین فراهم کند.
هنگام استفاده از خازن های سرج موجود یا ظرفیت کابل، باید توجه داشت که رفتار انتقال این خازن ها ناشناخته است.
و اینکه این اجزا ممکن است رفتار انتقال مناسبی در محدوده فرکانس نداشته باشند که برای اندازه گیری PD مطلوب است.
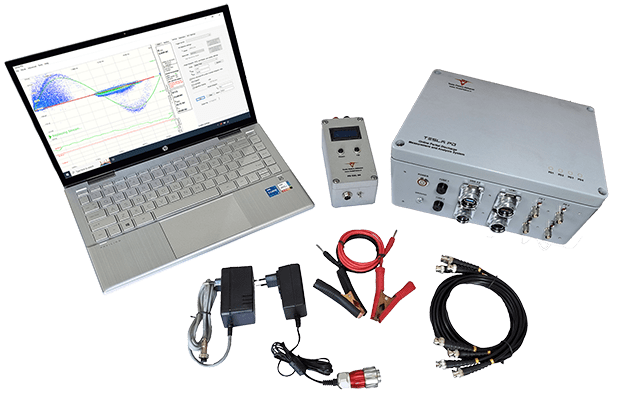
دستگاه آنالایزر آنلاین تخلیه جزئی
(ویژه تست تخلیه جزئی ژنراتور ها)
کالیبراتور CAL 2n – نرم افزار TESLA PD V1.4.1 راهنمای کاربری و آنالیز اطلاعات –
پهنای باند 20 کیلو هرتز تا 20 مگاهرتز – شامل تمام پترن های PRPD، TW ،PSA –
سرعت نمونه برداری 100MSPS با رزولوشن 10 تا 12 بیت
قابلیت اطمینان سنسورهای PD
سنسورهای PD که برای نظارت بر خط PD استفاده می شوند معمولاً به طور دائمی روی دستگاه نصب می شوند. ضروری است که سنسورهای PD خود باعث خرابی سیم پیچ استاتور نشوند. با این حال، خازن های PD با هدف خاص متصل به سیم های ولتاژ بالا در سیم پیچ استاتور ممکن است خطری برای خطای فاز به زمین ایجاد کند. بنابراین، چنین سنسورهای خازنی PD باید:
– دارای ولتاژ خاموشی PD (PDEV برای سطح PD مشخص شده 10 pC) بیش از دو برابر ولتاژ عملیاتی فاز به زمین، که با آزمایش معمول مناسب تأیید شده است.
– ولتاژ روتین AC حداقل با ولتاژ مشابه سیم پیچ استاتور آزمایش شود.
– تست نوع استقامت ولتاژ را در 2.17 برابر ولتاژ خط به خط ماشین انجام داده و در عرض 400 ساعت از کار نیفتاده است.
– دارای ضریب اتلاف کم است که با درجه حرارت تا حداکثر دمای عملیاتی مورد انتظار در محل نصب سنسور پایدار است و با آزمایش نوع مناسب تأیید شده است.
جزئیات بیشتر برای تست قابلیت اطمینان سنسورهای PD در ضمیمه D توضیح داده شده است.
دستگاه اندازه گیری PD
سیگنال های الکتریکی از انواع مختلف حسگرها که در 6.4 توضیح داده شده اند را می توان با استفاده از دستگاه های اندازه گیری مختلف اندازه گیری و ثبت کرد. نوع دستگاه اندازه گیری مورد استفاده ممکن است به نوع مورد نظر پردازش، تجزیه و تحلیل و تفسیر سیگنال بیشتر بستگی داشته باشد، برای شماتیک سیستم اندازه گیری به شکل 1 مراجعه کنید. با این حال، باید از وسیلهای استفاده شود که بتواند مستقیماً یا با پردازش بعدی سیگنالهای PD اندازهگیریشده، حداقل یک توزیع بزرگی پالس و یک الگوی تخلیه جزئی حلشده فاز را مطابق ضمیمه C ارائه کند.
دستگاه اندازه گیری PD به طور معمول از
– تقویت کننده ورودی و فیلتر فرکانس؛
– واحد پردازش سیگنال، به عنوان مثال. شکلدهی پالس، نمونهگیری و نگهداری، دیجیتایزر، شکل موج ولتاژ فاز به زمین؛
– سرکوب نویز و اختلال؛
– تجسم و همگام سازی فاز.
به منظور بهره برداری کامل از ویژگی های سنسور PD نصب شده، محدودیت های فرکانس دستگاه اندازه گیری باید پاسخ فرکانسی شناخته شده سنسور نصب شده را که برای یک امپدانس ورودی دستگاه اندازه گیری PD معین طراحی شده است، پوشش دهد.
پارامترهای اندازه گیری PD
پارامترهای مختلف اندازه گیری PD را می توان برای تجسم، تجزیه و تحلیل و تفسیر اندازه گیری های آنلاین استفاده کرد. برای اینکه بتوانیم وضعیت واقعی عایق سیم پیچ استاتور را ارزیابی کنیم،
پارامترهای مورد استفاده باید ابزار حساسی برای توصیف ماهیت PD از ماشین تحت آزمایش و همچنین توسعه فرآیندهای PD در طول زمان در هنگام تغییر وضعیت ماشین با اندازهگیریهای منظم فراهم کنند.
بزرگی PD
برای ارزیابی رفتار PD، حداقل مقدار PD q هر پالس PD باید اندازهگیری و پردازش شود. اندازه PD q یک پالس منفرد را می توان بر حسب ولتاژ (mV) یا بر حسب بار ظاهری (nC) بیان کرد، بسته به رویکرد اصلی سازنده سیستم اندازه گیری PD (نگاه کنید به شکل 1) و امپدانس و مشخصات فرکانس جسم آزمایشی تبدیل اساسی بزرگی PD اندازه گیری شده بر حسب ولتاژ (mV) به شارژ (nC) و بالعکس برای سیم پیچ های کامل استاتور امکان پذیر نیست.
مقدار اندازه گیری PD ممکن است به مشخصات و تنظیمات دستگاه ضبط بستگی داشته باشد. بحث مفصل در IEC 60034-27-1:2017، ضمیمه B ارائه شده است.
پارامترهای PD اضافی
هنگام استفاده از دستگاههای اندازهگیری PD دیجیتال، قدر PD qi برای قطار پالسهای PD برای هر رویداد PD فردی که در طول زمان اندازهگیری رخ میدهد و ولتاژ لحظهای مربوطه در زمان ti یا زاویه فاز φi در دوره مربوطه به دست میآید. ولتاژ خط در هر مورد، مقادیر اندازه گیری شده PD با نوع مناسبی از دستگاه اندازه گیری ثبت و ذخیره می شود تا بعداً با روش های مناسب آنالیز شود. این تضمین می کند که هر پارامتر PD مشتق شده اضافی را می توان پس از آن بر اساس داده های اندازه گیری اولیه محاسبه کرد. بسته به سیستم و تنظیمات فیلتر، ممکن است قطبیت پالس از سیگنال PD از بین برود.
هنگام استفاده از سیستمهای اندازهگیری که در محدوده HF یا VHF کار میکنند، پارامترهای حوزه زمانی اضافی، مانند زمان خیز، زمان سقوط یا حتی شکل کامل هر پالس PD را میتوان اندازهگیری کرد تا متعاقباً روشهای تحلیل حوزه زمان و فرکانس ویژه اعمال شود، به عنوان مثال. برای جداسازی منابع مختلف PD